车载激光雷达(LiDAR)全息交通环境快速感知系统,集成了激光扫描仪、全景数码相机、多频GPS/GLONESS接收器、惯性测量单元(IMU)等传感仪器,可实现道路环境三维模型重构和全路幅路面病害三维特征提取。系统测量单元的最大测程为420m,测距精度为±5mm,视角场为360°,扫描频率为75Hz。
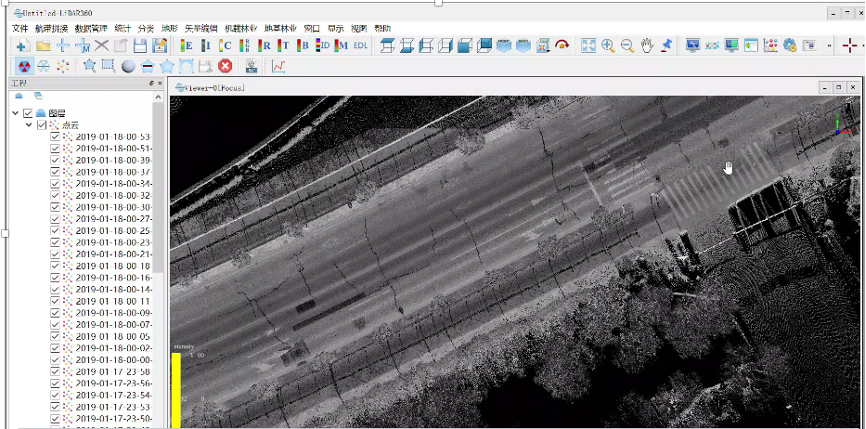
本系统的技术优势在于:1)快速高效:通过高速激光扫描测量结合全景影像的方法,可大面积、高分辨率地快速获取道路环境三维点云数据;2)分析智能:基于神经网络智能分析算法,实现海量点云数据的处理,实现关键要素提取和三维特征计算;3)全路幅覆盖:设备可支持全角度激光扫描,单次采集即可获取双向车道完整数据,支持大尺度病害检测。
本系统可以精确、快速获取周边环境、道路交通设施、路基路面等地物的三维特征信息,适用于道路环境三维空间信息的精确重构和管理,是道路环境数字化感知的有效补充。


