同济大学智能交通新兴计算与感知研究课题组,在中科院1区Top期刊Transportation Research Part C: Engineering Technologies上发表了题为“Macroscopic modeling and dynamic control of on-street cruising-for-parking of autonomous vehicles in a multi-region urban road network”的研究论文,论文作者为同济大学的赵聪(Cong Zhao)、李兴华(Xinghua Li)、杜豫川(Yuchuan Du)和埃因霍芬理工大学(Eindhoven University of Technology)的Feixiong Liao。该研究聚焦城市“停车难”痛点,在解析自动驾驶对停车模式影响的基础上,提出了网联云调度的停车管理新范式,为智能网联交通环境下的城市停车管理提供了新思路和相应的决策支持工具。

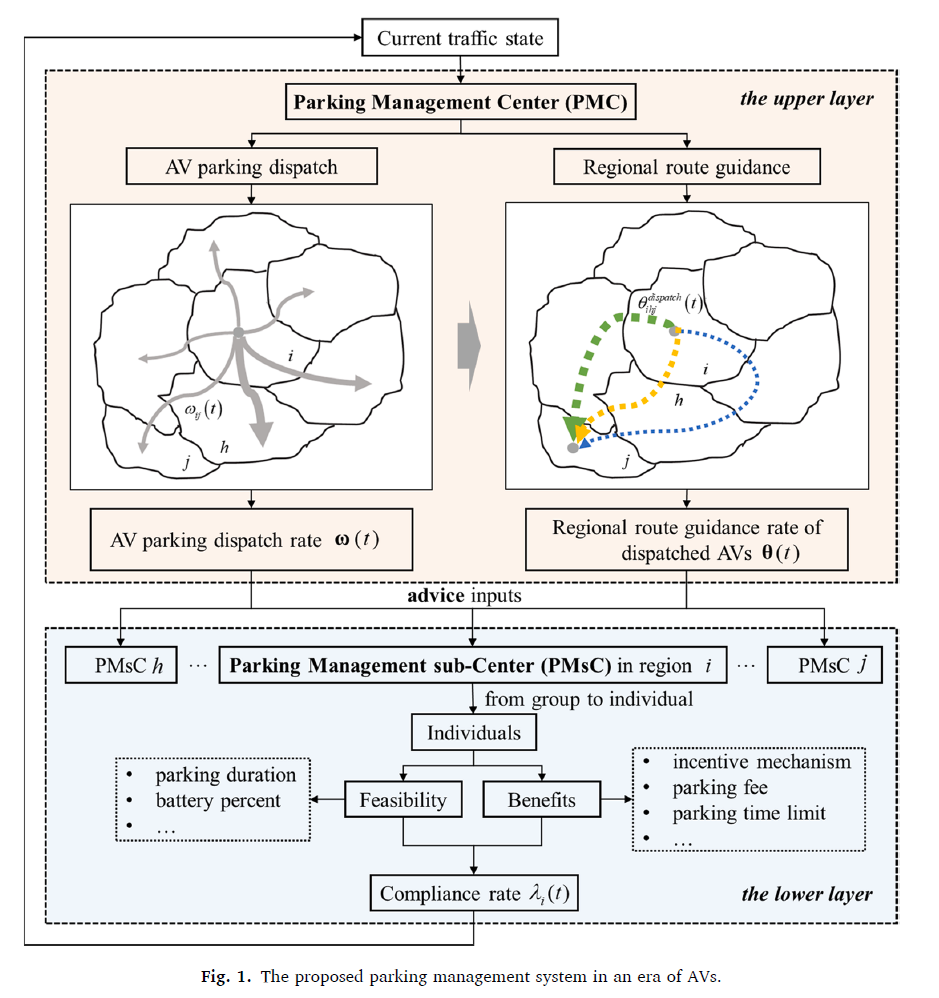
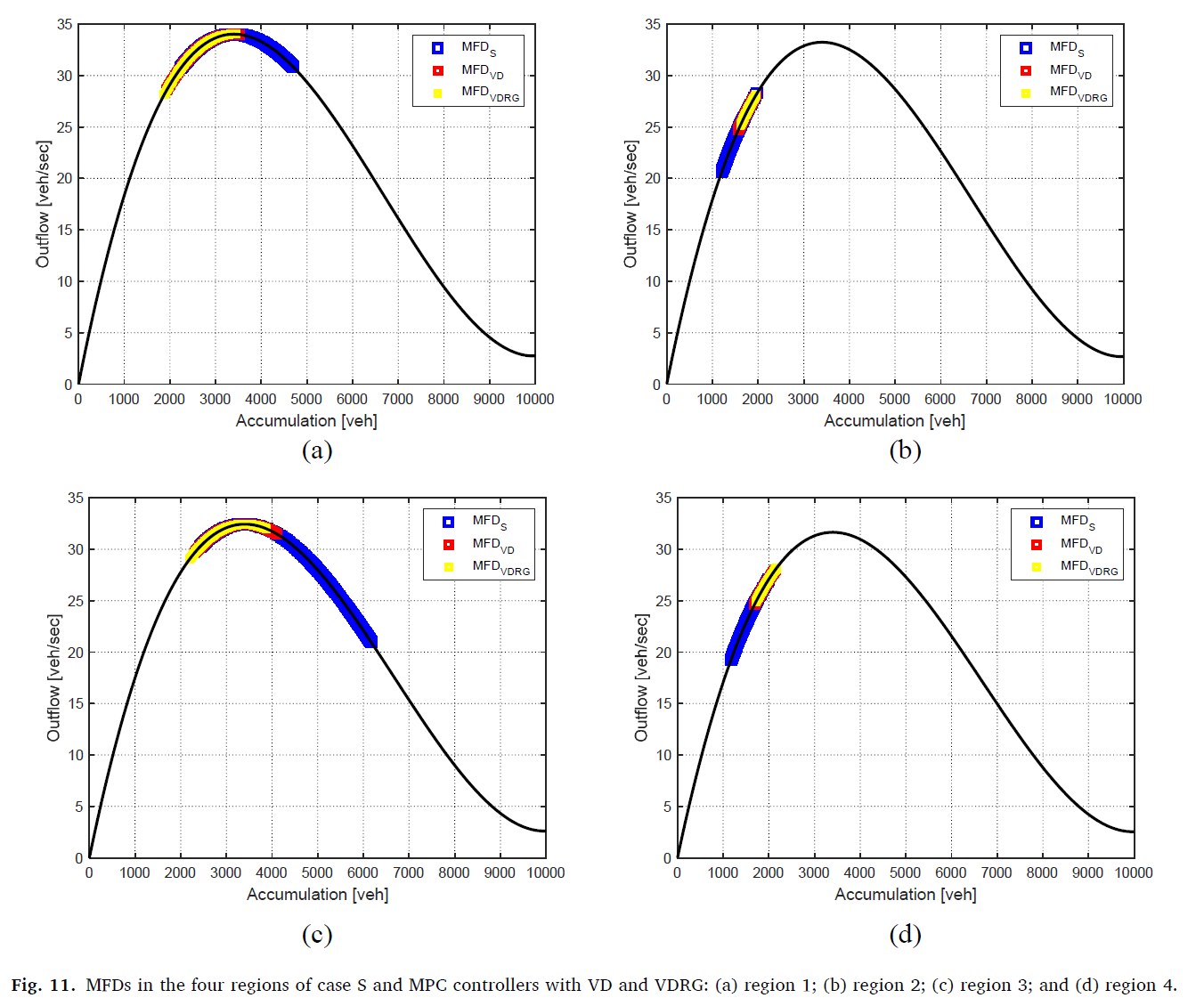
为定量分析自动驾驶环境下停车巡游与动态交通之间的影响关系,我们提出了柯布道格拉斯式(Cobb-Douglas)的区域停车泊入率函数,可综合分析空闲停车位密度、搜寻车辆密度、路网运行车速和自动驾驶比例等因素的影响。进而,我们将泊入率函数与路网宏观基本图(Macroscopic Fundamental Diagram, MFD)集成建模,形成了区域停车利用与交通状态综合分析的方法模型,并结合模型预测控制提出了不同停车供需模式和交通系统状态下的多区域间停车调度和路径引导方法。实际算例结果表明,在中心化统一调度管理下,停车调度方法可有效平衡区域间停车供需并优化路网交通运行效率。
论文链接:https://doi.org/10.1016/j.trc.2021.103176


