同济大学智能交通新兴计算与感知研究课题组,在中科院1区Top期刊IEEETransactions on Intelligent Transportation Systems上发表了题为“A Novel Spatio-Temporal Synchronization Method of Roadside Asynchronous MMW Radar-Camera for Sensor Fusion”的研究论文,论文作者为同济大学的杜豫川(Yuchuan Du)、覃伯豪(BohaoQin)、赵聪(Cong Zhao)、朱逸凡(Yifan Zhu)、曹静(Jing Cao)和暨育雄(Yuxiong Ji)。该研究聚焦于智慧道路中分离式的路侧摄像头和毫米波(millimeter-wave, MMW)雷达时空同步问题,在提取场景特征和交通流特征的基础上,构建了时空同步优化模型和相应求解算法。研究成果为路侧多传感器时空同步提供了一种便捷、高效、安全、经济的方法。
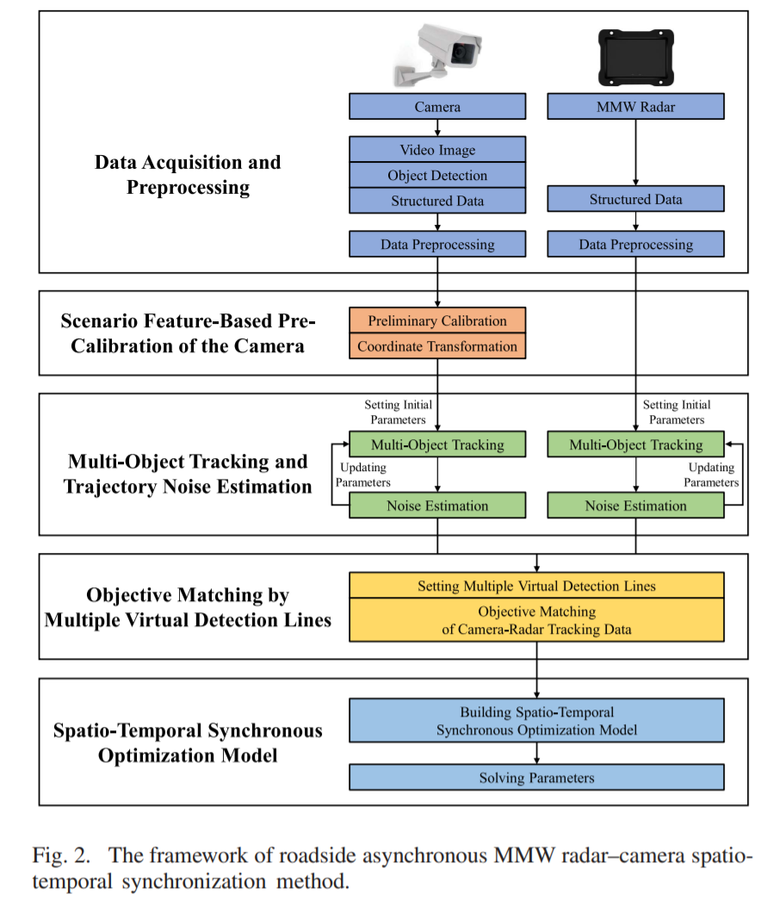
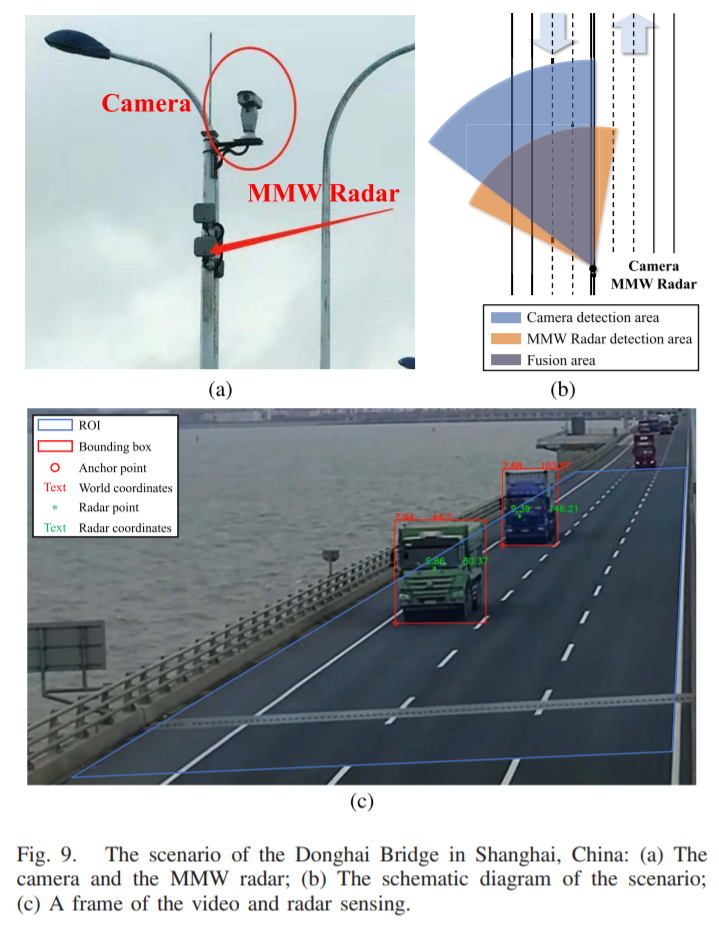
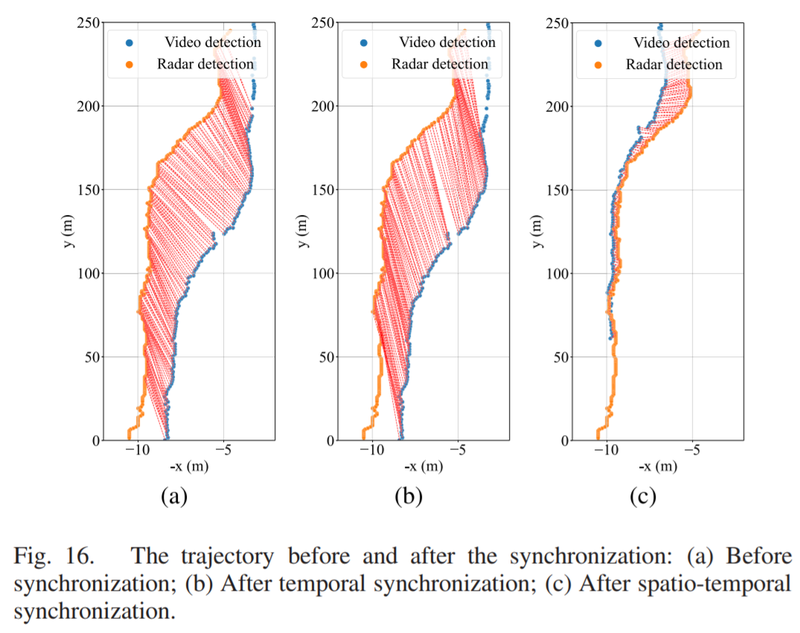
在智能车路协同系统中,如摄像机和毫米波雷达等路侧传感器可以为智能网联车提供超视距的交通信息。区别于车载设备的是,现有路侧传感器往往隶属于不同的系统,在时间上表现为异步,在空间上表现为坐标系不匹配。该论文提出了一种新颖的异步路侧毫米波雷达与摄像机进行时空同步的方法,利用场景特征提取车道线角点,对摄像机进行预标定。基于各传感器时间流率一致的特性,设置多条虚拟检测线匹配连续车辆的车头时距,并对跟踪数据进行目标匹配。最后,该论文建立了时空同步优化模型,并用约束非线性最小化求解器对参数进行了调优。使用上海东海大桥实测数据验证了该方法的可行性和有效性。结果表明,在论文案例分析中,摄像机和雷达之间存在33帧(33*40 ms)的时间偏差。同步后,道路纵向平均空间偏差由2.47 m减小到0.42 m, 道路横向平均空间偏差由64.06 m减小到2.34 m。
论文链接:https://doi.org/10.1109/TITS.2021.3119079


