同济大学智能交通新兴计算与感知研究课题组,在中科院1区Top期刊Transportation Research Part C: Engineering Technologies上发表了题为“Comfortable and energy-efficient speed control of autonomous vehicles on rough pavements using deep reinforcement learning”的研究论文,论文作者为同济大学的杜豫川(Yuchuan Du)、陈菁(Jing Chen)、赵聪(Cong Zhao)、刘成龙(Chenglong Liu),埃因霍芬理工大学(EindhovenUniversity of Technology)的Feixiong Liao,和加州大学伯克利分校(University of California, Berkeley)的Ching-Yao Chan。该研究提出了一种面向舒适和节能的自动驾驶速度决策控制框架,采用了新兴的深度强化学习建模方法,通过实测数据仿真验证了其有效性。研究成果为车路协同环境下自动驾驶速度决策控制提供了新思路。
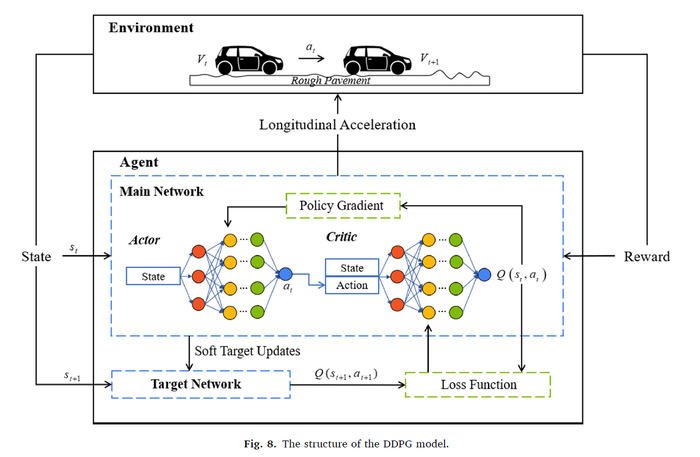
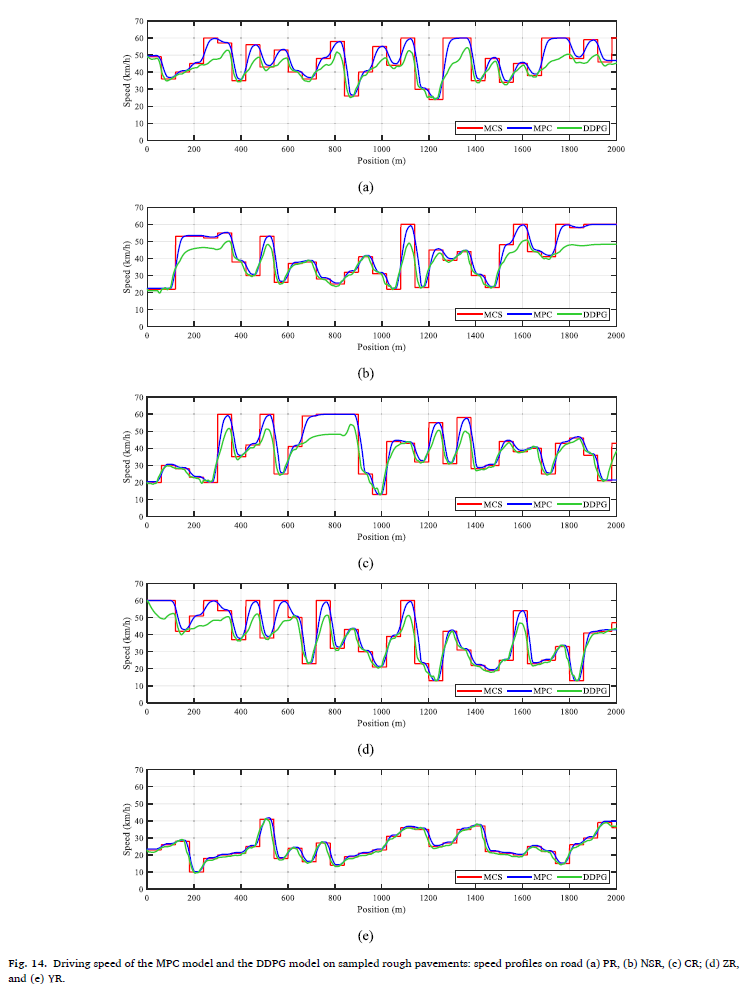
车辆在粗糙路面上行驶时将面临舒适度差和能耗高的问题,但是现有研究在解决此类问题时计算效率较差、无法适应动态变化的环境。随着感知和通讯技术的发展,众筹的路面信息和动态交通信息可为驾驶性能的提升提供帮助,特别是通过控制车速实现舒适和能源效率的提升。本文面向粗糙路面场景提出基于车路协同的自动驾驶速度控制框架。其中,我们推荐采用“最大舒适速度”表示自动驾驶车辆前方垂向舒适信息。同时,我们采用深度强化学习算法学习舒适、节能的速度控制策略。该模型采用上海市粗糙路面数据进行训练。实验结果证明,相比于模型预测控制,该模型所提升的舒适、节能、计算效率可达到8.22%、24.37%、94.38%。因此,所提出的速度控制框架对于粗糙路面上实时车辆速度控制是有效的。
论文链接:https://doi.org/10.1016/j.trc.2021.103489


